SLAM issues
1. SDK Version: 4.0.2
2. Development Environment: Unity-Android
3. Tracker/Scanner: visual slam
4. License Type(Free / Pro-One Time Fee / Pro-Subscription / Enterprise):Free
Hello, I wanted to do a Visual Slam of a entire room like in this video: https://www.youtube.com/watch?v=cgLK5F7Kgzg.
However, I downloaded your MAXST AR SDK and Map Manager at PlayStore and I can't make it. It keeps loosing track and I only succeed at saving small spaces, like a desk.
Then, I download the examples and the last SDK: 4.0.2 and Unity package. But, the same thing occurred. Is there a way to map a entire room?
Another issue that I had was that I did not could use the MapRendererBehaviour and the MapViewerBehaviour; it keeping giving null pointers. Is there another way to generate the Mesh? Am I missing any configuration?
Thanks.
Hello.
Thanks for your interest in MAXST SDK.
The movie clip which you linked shows our on-going research which are not applied to SDK 4.0.2.
We have a plan to release an improved visual slam for scanning 0.3~1.5m sized objects in the end of Jaunary.
And we'll release a room scanner in 3Q. 2019.
Thanks.
John,
MAXST Support Team
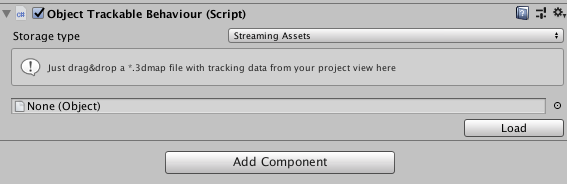
just drop down at None(Object). and clicked load button. then you can see generated Mesh.


