Visual SLAM Learning Guide
By using Visual SLAM, you can create the map file of the environment around you.
This documentation describes you how to make a map more precisely while learning an environment.
The map file you made with Visual SLAM will be used in Object Tracker. Object Tracker calls the map file and place augmented content wherever you want.
Select Proper Space
Initial poses should be created in the environment with enough feature points. It is difficult to make an initial pose if there are not enough feature points.

In Visual SLAM, the virtual map file will be created by detecting feature points in the environment. Feature points are detected where the environment is easily distinguished or identified.
When the Init progress at the bottom of the screen reaches 100, the initial pose is successfully created.

Create Initial Pose
The initial pose is easily created when there are enough feature points.
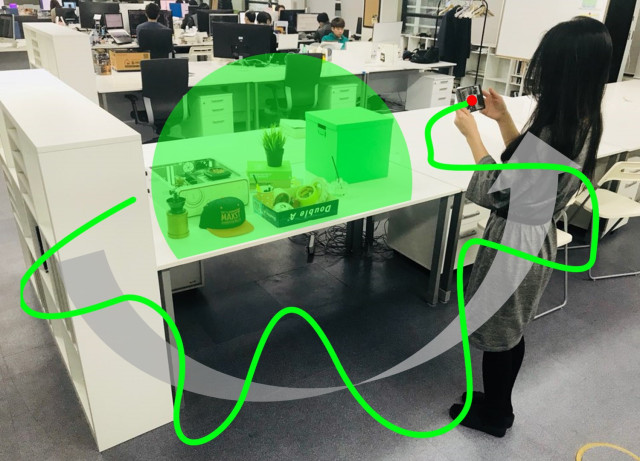
When you create the initial pose, move the smartphone forward and backward with the environment you want to learn.
When the initial pose is created, an axis will appear in the center of the screen.
If you find the green line vertically, it means that your initial pose is created correctly.


Map Extension
Draw semicircles around the environment you want to learn.
Keyframe value at the bottom becomes higher as the environment is learned in various angles and directions.


Preferably, save the map when the Keyframe value is 30 ~ 40 to extend the map more correctly.


