
Visual SLAM Tool app is a object/space mapping tool that ensures more convenient utilization of Visual SLAM and Object Tracker functions of MAXST AR SDK
It uses Visual SLAM engine so it analyzes input from a camera and creates a point cloud based on extracted feature points. Therefore the richer the texture of an object is, the more precise the 3D map can be created.
Before creating a 3D map check whether your target object/space and environment is appropriate.
Select the Target object/space
Check the Mapping Environment
Select the Target Object/Space
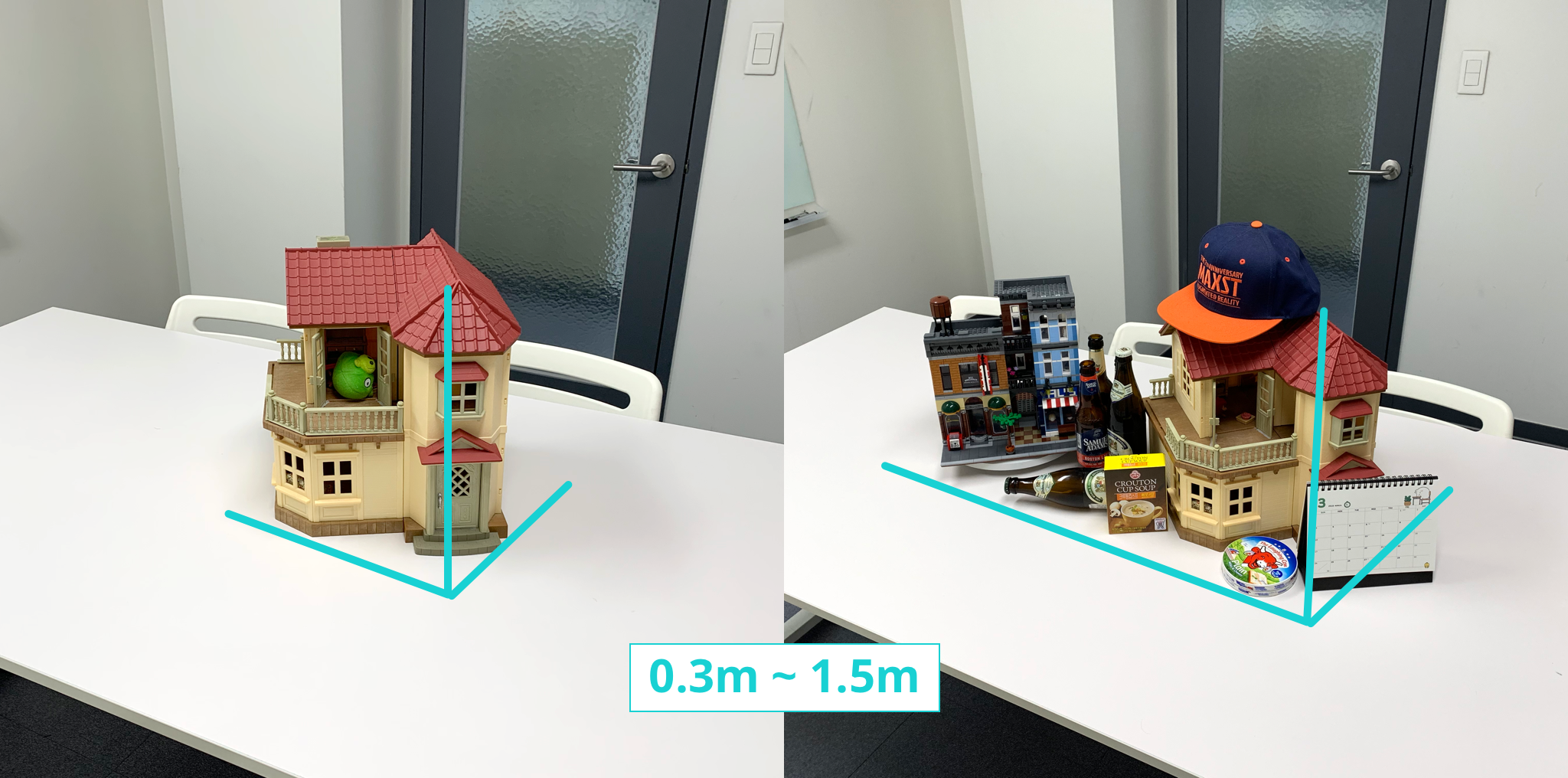
Recommended Size of the Object/Space
Visual SLAM Tool is optimized to create Medium Scale(0.3m-1.5m) objects and space 3D map.
Select the Object/Space with Rich Texture
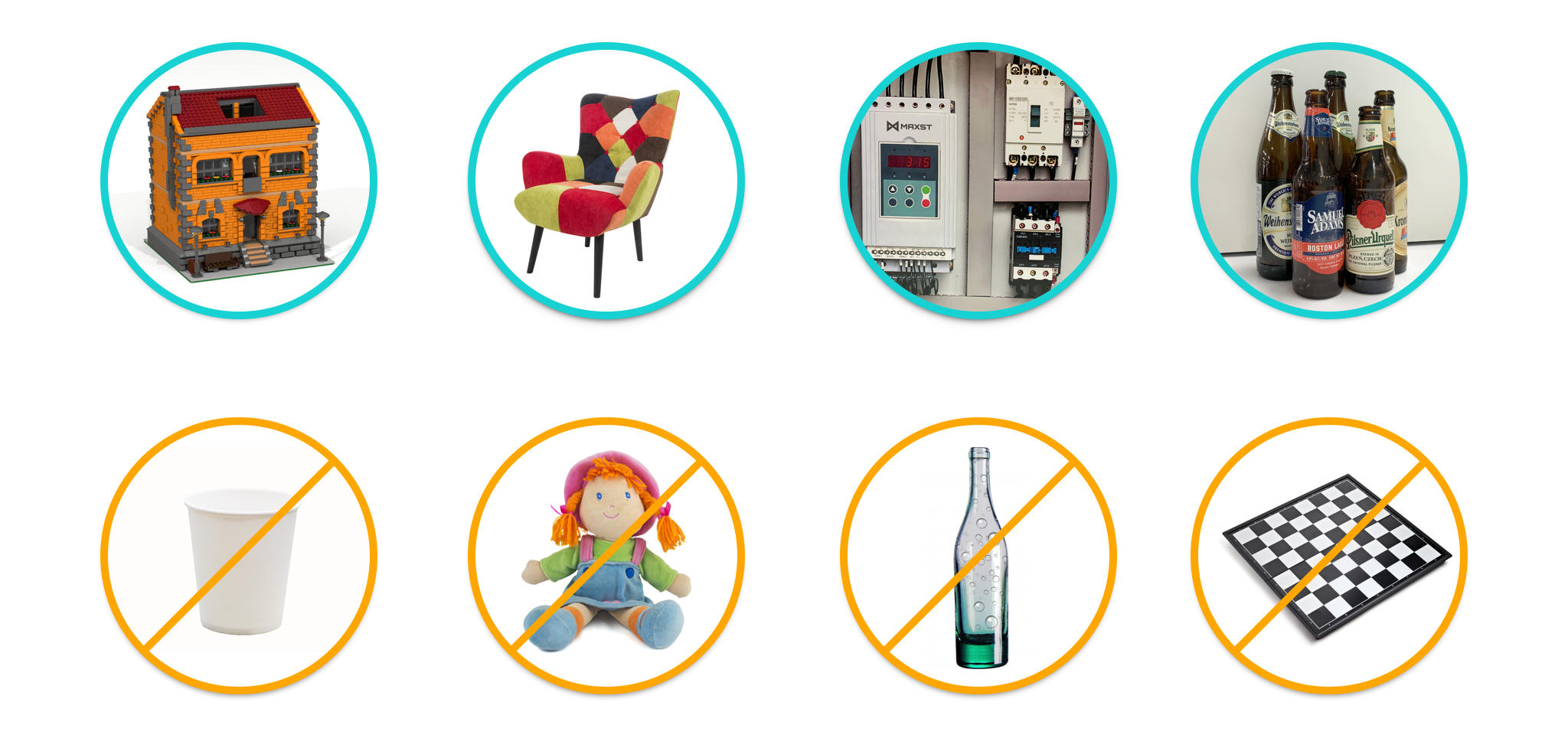
Target with poor feature point or feature point that can be easily affected by the environment is not recommended.
- Poor Textured Object: Object with simple shapes, smooth surfaces or repeating patterns has difficulty in creating 3D maps because of their poor feature point.
- Non-Rigid Object: Non-Rigid object is not recommended because feature point can change during training or when recognizing objects.
- Transparent Object: Transparent object can be trained with a background so feature point can change during training or when recognizing object.
- Specular Object: Object that reflects light is not recommended because feature point change easily depending on the lighting.
Check the Mapping Environment
Select the Space
Place the object in the empty space.

Check the Light Condition
Map your target under good light conditions. For example, a bright office and studio are recommended. In dark environments, the Visual SLAM Tool may not extract enough feature point to create a 3D map.

Check whether the Mapping Environment is Similar to Recognition Environment
Set up your mapping environment in consideration of recognition one. If there's a big difference between the recognition environment and mapping environment, recognition may be difficult.


